激光SLAM第一篇:基础知识
转载 2020-01-07 15:36 合肥井松 来源:合肥井松
近年来,智能机器人技术在世界范围内得到快速发展。人们致力于把机器人应用于各种场景中,从室内外搬运机器人,到自动驾驶汽车,再到空中无人机、水下探测机器人等,智能机器人的运用都得到了巨大突破。
在智能机器人研究中一个最关键的技术就是同时定位和建图,也就是所谓的SLAM技术。试想人是如何去判断自己在环境中的位置?没错,眼睛!不过,大脑对双脚移动的感知也能给你提供相对运动的信息。人的大脑就是通过综合这些感官信息来判断位置和移动的,这也是SLAM技术的灵感来源。
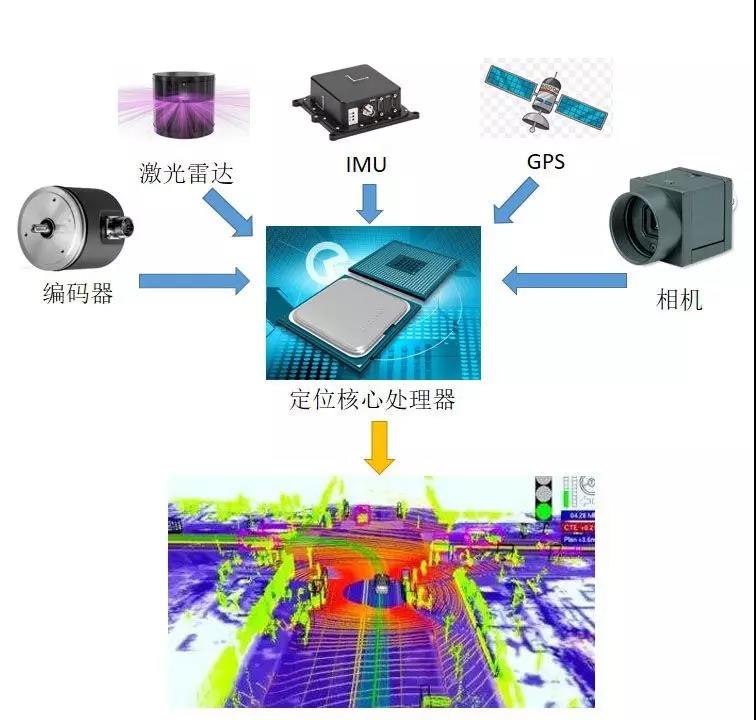
SLAM技术的出现彻底解决了机器人研究领域中“我在哪儿”的问题,使机器人在未知环境中的自主移动成为可能。SLAM通过输入各种各样的传感器信息:驱动车轮的电机信息、IMU、GPS、激光数据、图像数据等,并利用多传感器融合算法求解出一个精确的机器人位姿(即位置和姿态,以下简称pose),同时,将每个pose处得到的传感器数据拼接起来形成完整的地图,又可作为计算位姿的依据。
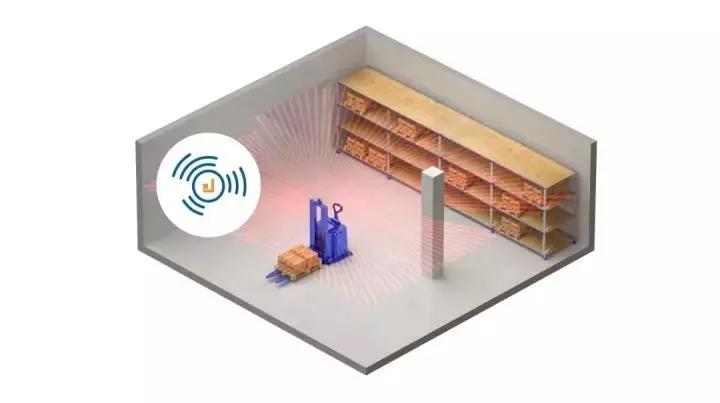
随着智能仓储与智能物流的兴起,各行各业都在加速采用智能化的物流装备替代人工搬运,达到降本增效的目的,自动化引导小车便是备受追捧的智能装备之一。
为满足不同行业、不同场景的使用需求,井松科技自主研发了基于激光雷达的SLAM技术——该技术可用于长颈鹿、梅花鹿、猛犸象等多个自动化引导车体,类型丰富,适应不同工况场合。
相较于传统的人工叉车,激光SLAM无人叉车在货物搬运过程中完全不需要人工介入,而且高效精准,能够实现指定位置之间的无人化运输;支持自动充电,可实现7*24h全天候工作。
相关资讯
更多- 举杯有佳酿,锂电守醇香--比亚迪叉车承包啤酒快乐搬运!
- 山猫叉车“冠军阵型”亮相!谁是您的“搬运之王”?
- 合力宇锋 | 携手石化行业巨头,打造叉车AGV智能仓配新应用
- 「冀」遇全球,宝骊受邀参加国家级展会
- 政校企齐聚佛朗斯,共探产教融合人才共育新路径
- 华睿科技 | 生态大会|深耕江城智造沃土,AMR聚力产业新局
- 唯创安全 | 叉车安全 9 条 "生命线":违章哪是罚钱,是玩命
- 赋能绿色“锦”程,林德新能源电动平衡重叉车批量交付永荣股份
- 杭叉集团|杭叉集团与杭州电子科技大学信息工程学院共建“海外工程师订单班”,精准赋能全球化人才战略
- 诺力榜样丨扎根诺力二十二载,初心如磐的一线管理先锋 —— 车间主任蒋凎权