日本大阪大学开发仿生“Myriapod”机器人依靠动态不稳定性进行导航
原创 2023-08-12 09:17 南山 来源:AGV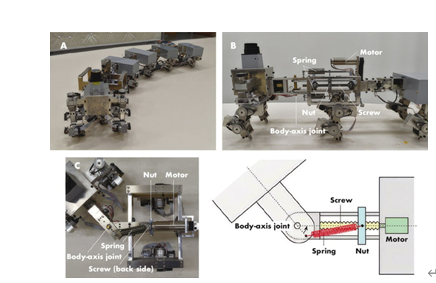
Myriapod机器人(A)和可变体轴柔性机构(B.前视图,C.俯视图,D.俯视图示意图)
外媒报道,日本大阪大学机械科学与生物工程系的一组科学家们成功研发了一种名为“Myriapod”的仿生多足机器人,这款机器人能够通过依赖动态不稳定性来进行导航,并且能够自由切换直线行走和曲线行走的模式,未来或许可以广泛用于搜索和救援行动或行星探索。
在地球上的生物界中,大多数动物都拥有强大的腿部运动系统,让它们能在各种环境中表现出高度的灵活性。然而,有些令人沮丧的是,想要复制这一现象的工程师们常常发现有腿机器人非常容易受损。一条腿的损坏都可能严重限制这些机器人的功能。这也是由于机器人穿越复杂环境时,需要大量的计算机运算能力。
但现在,大阪大学的研究人员们打破了这一难题,他们开发了一种仿生“多足”机器人,能够自然地利用不稳定性,让机器人的直线行走可以轻松转变为曲线运动。这款机器人由六个部分组成,每个部分连接两条腿,并配备灵活的关节。通过改变联轴器的灵活性,机器人可以在不需要复杂计算控制系统的前提下实现转动。
这项技术的核心是,增加关节的灵活性会引发一种名为“干草叉分叉”的效应,在这种情况下,机器人的直行将变得不稳定。相反,机器人会开始曲线行走。研究团队通过可调节螺钉和电机来实时修改联轴器的灵活性。
值得注意的是,工程师通常会尽量避免造成不稳定,但在这个项目中,他们却有意地利用了不稳定性来实现高效的机动性。研究团队的一位成员 Shinya Aoi 解释说:“我们受到一些极为灵活的昆虫的启发,正是这些昆虫掌控了自身运动中的动态不稳定性,从而实现了迅速的运动变化。”他们的设计思路不仅降低了计算复杂度,还减小了能源消耗。
测试发现,这款机器人具备很好的导航能力,可以通过弯曲路径到达目标地点。另一位研究作者 Mau Adachi 表示,他们能预见到这项技术在各种场景,如搜索救援、危险环境作业或外星探索等方面的广泛应用。未来版本还可能加入更多部分和控制机制。
此项技术不仅有助于人们更便捷地与机器人进行互动,还可能在工业环境中发挥作用,例如,大规模组装产品的工人可以借助这款机器人节省时间并降低受伤风险。更重要的是,它还可能帮助残疾人或行动不便的人更轻松地组装产品,从而提高他们的生活独立性。
例如,如果你在家中组装家具时遇到困难,这款经过特殊训练的机器人可以预先为你准备必要的工具和零件,使组装过程变得更加轻松。由此可见,这款仿生“Myriapod”多足机器人不仅具备前所未有的灵活性和机动性,还展示了工程和生物学的完美结合,为未来的探险和救援任务开辟了新的可能性。
相关资讯
更多- 专攻楼层仓储!中力数智新仓捅破楼层仓储“天花板”
- 壮大交通经济 勇当开路先锋 | TCF亮相第七届浙江国际智慧交通产业博览会!
- 杭叉海外|杭叉与明星经销商的故事:HC Forklifts UK
- 佛朗斯股份受邀出席第十四届上市公司发展年会,获评“出海产业卓越竞争力上市公司”奖
- 批量交付!宝骊电车助力新能源企业绿色搬运
- 杭叉集团|杭叉集团获批加入全国机器人标准化技术委员会人形机器人标准工作组
- 林德亮相2025第六届餐饮零售食材供应链决策者年会
- 从啤酒厂到蒸馏厂,探索全新博索尼(BOLZONI)啤酒桶夹
- 客户案例|从地堆到8米货架:卓一窄巷道方案助新材料行业旧仓提升70%库容
- 喜报!诺力执行副总裁徐松屹荣获浙江省杰出职业经理人“金马奖”