全局视野 | 科聪突破智慧港口建设挑战
转载 2024-08-01 09:32 科聪 来源:科聪

中国港口行业正面临转型升级的关键时刻。人口老龄化和产业升级导致劳动力成本不断攀升,同时,“一带一路”倡议的推进也带来了货物吞吐量的大幅增长。这些因素共同推动了港口行业对降低成本、提升作业效率的迫切需求。
面对这些挑战,科聪推出了基于MRC5000-U导航控制器的集装箱卡车无人驾驶解决方案。
无人驾驶集卡解决方案
RESOLUTION
以MRC5000-U控制器为核心,结合先进的传感器技术、人工智能算法和强大的数据处理能力,打造了一套全自动化的集卡运输系统。该系统专为智慧港口等低速无人驾驶场景需求设计,同时考虑到现有集卡车队的智能化升级需求,确保了其广泛的适用性。
该解决方案包括以下关键模块:控制系统、移动控制总线、感知总线、移动安全总线和应用功能总线,确保集卡在各种复杂环境下的稳定运行和高效作业。

MRC5000-U导航控制器集成了3D激光&GNSS RTK融合定位导航算法,为无人驾驶集卡提供了室外无人驾驶导航能力。厘米级的高精度定位确保了集卡在运输过程中的精确停靠和货物装卸,极大提升了作业效率。
科聪驱动智慧港口建设
DIFFICULTY RESOLUTION
全域高精度定位导航
在港口环境中,由于集装箱堆叠过高,可能会干扰导航信号,这对无人驾驶集卡的定位和导航系统构成挑战。另外无人驾驶集卡需要与大型设备配合作业,对位精度要求高,需要实现与桥吊、龙门吊的精准对接。
科聪无人驾驶集卡解决方案提供3D激光SLAM+GNSS RTK全域高精度融合定位导航方案以确保无人驾驶集卡的精确导航。
针对不同港口客户的需求,科聪定位方案提供两种不同的应用方式。依托CORS连续运行卫星定位导航服务系统,MRG1000高精度定位模块与GNSS天线协同,通过4G差分模块的无缝对接,实现数据的高效传输与处理,确保导航控制器精准接收RTK解算后的GPGGA数据和航向角信息,还融合了3D激光雷达导航算法,实现厘米级精度的定位。

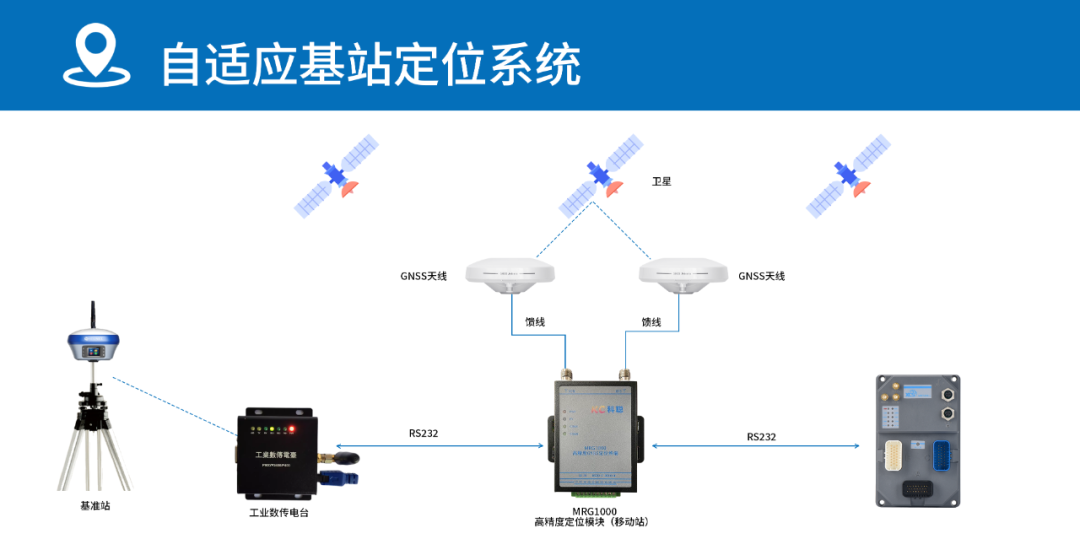
针对CORS服务系统不可用的环境,科聪提供了自建基站的定位方案。MRG1000模块同样通过GNSS天线获取数据,并将数据通过工业数传电台发送至自建的基准站。基准站进行差分数据的计算,并将结果实时发送回MRG1000,结合3D激光SLAM环境感知,导航控制器同样能够接收到精确的GPGGA数据和航向角信息,确保无人驾驶集卡在集装箱堆叠区域都能保持准确的定位和导航。
三重安全避障系统
室外开放式场景下,人机交互混行不可避免,需要优化策略以确保安全和效率。科聪解决方案配备了全方位的安全系统,包括四角360°多线安全激光雷达,设置安全区域,一旦检测到障碍物立即停车并制动,同时播报避障停车语音。安全触边和急停装置的加入,为车辆提供了多重安全保障,确保在港口高密度作业环境中的安全性。
方案产品
SOLUTION PRODUCTS


相关资讯
更多- AiTEN三度亮相LogiMAT 2026 具身智能技术赋能物流自动化
- ALL IN 细节:中力股份携全场景数智方案亮相LogiMAT 2026
- 荷贝克:桥接亚欧,以“双核”驱动绿色能源通道
- IMS Gear | 亿迈齿轮CMEF 2026邀请函
- 合力宇锋 | 驱“冷”保“先”,筑造农产品行业智能仓储新范式
- 闪耀LogiMAT,宝骊用“实用”引爆全场
- 益佳品质 通行天下--中叉网专访益佳通新能源
- LogiMAT 2026展会回顾:诺力用技术创新解锁物流智能化
- 深耕品质 智领未来:台励福锂电叉车亮相LogiMAT2026
- 克拉克携Fusion集成锂电技术亮相LogiMAT2026 重塑电动叉车能源生态