镭神激光雷达助力东风悦享无人车Sharing-Bus完成极寒测试
转载 2022-03-30 10:01 镭神智能激光雷达 来源:镭神智能激光雷达
东风悦享无人车Sharing-Bus完成极寒测试
测试地点:黑龙江·黑河
地理坐标:北纬47°42′-51°03′
东经124°45′-129°18′
最低气温:-30℃
日前,搭载镭神智能激光雷达的东风悦享无人驾驶巴士Sharing-Bus,公布完成极寒测试的消息。
这象征着东风悦享无人驾驶车步入崭新阶段,同样也是镭神激光雷达在极寒天气下性能表现的最佳佐证。


作为自动驾驶的“眼睛”,激光雷达起着关键的感知探测作用,承担着为智驾反应提供精确数据的重要责任,也是自动驾驶顺利运行的前提之一。随着应用空间和时间的变化,极端天气在所难免,激光雷达也势必会面临环境考验。
想要让无人车在极寒气候下也能精准感知、顺利行驶,需从激光雷达稳定三维地图构建与可靠道路标志识别等方面进行考虑。这便考验着激光雷达的”环境适应性“。
海拉尔开展极寒天气测试
继在漠河(-35℃~-25℃)顺利完成多款激光雷达的极寒测试后,镭神智能汽车事业部可靠性与测试中心团队转向内蒙古海拉尔区(-40℃~-25℃),挑战更寒冷的天气测试。
以符合车规级标准的128线混合固态激光雷达CH128X1为例,测试团队开展了十三个项目测试。
包括:性能测试、盲区测试、最远距离测试、水平视场角与分辨率、垂直视场角与分辨率、黑车点云数量测试、行人黑衣点云数量测试、锥筒点云数量测试、轮胎点云云数量测试、数据传输测试、道路测试、低温启动测试、低温工作测试。

(镭神智能可靠性与测试中心团队)

(室外环境上路测试)
-40℃~-25℃各项性能表现良好
在海拉尔经历数天的实际上路测试后,CH128X1的各项性能指标表现良好,最终的实验结果均“通过”。
测试结果证明,即使在低温天气下,CH128X1的电机依旧正常工作并稳定输出数据,最远探测距离可达200m(160m@10)。在测试不同反射率10%、70%、400%下的绝对误差与均方差时,精度均在标准以内。水平视场角为120°(误差≤1°)和垂直视场角25°(误差≤0.5°)
极寒天气下点云数据稳定
值得一提的是,在真实道路环境下,CH128X1对环境(路牌、栏杆、灯杆、树木、车道线等)、车辆(cut in、cut out、对面车辆等)、行人均能精确感知,并且感知点云数据呈现稳定。
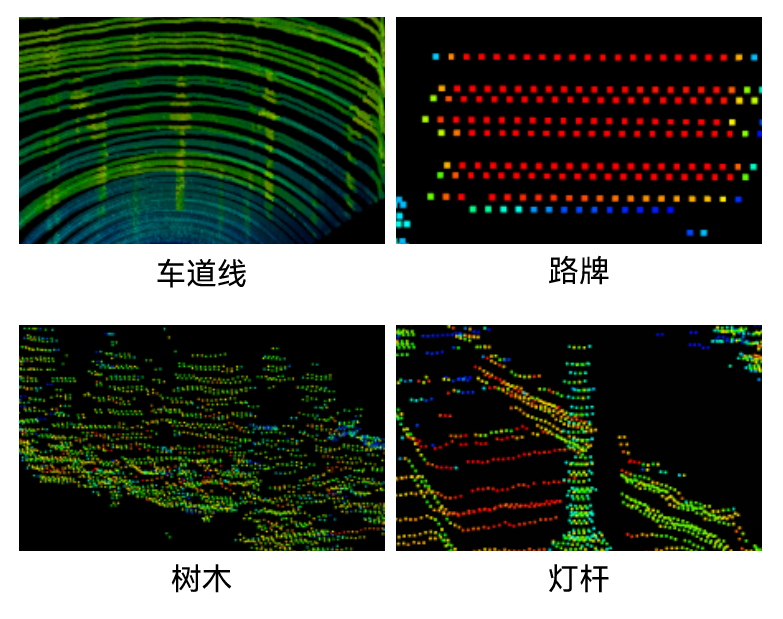
(CH128X1在极寒天气下的实际路侧效果)
目标识别距离和识别效果良好
同时,考虑到低温雪天对激光雷达对反射率低的目标物的探测效果的影响。
产品测试人员以黑车、行人黑衣、锥筒、轮胎为典型目标,分别在上车激光雷达与目标物距离10至200米的区间内,以20米为等差数列,设置最多13组的测试距离,根据不同目标物选择适宜的测试距离,从近至远,进行目标物的识别效果和识别距离测试。

(测试团队测试现场)
在四组目标测试项目中,结果均与各自的测试标准相符,测试达标。
以上测试结果,显示了镭神智能激光雷达CH128X1在极寒天气下依旧突出的环境感知能力,佐证了CH128X1的环境适应性。而这也将有力助推无人驾驶得以在更多复杂环境场景下安全应用。
相关资讯
更多- 举杯有佳酿,锂电守醇香--比亚迪叉车承包啤酒快乐搬运!
- 山猫叉车“冠军阵型”亮相!谁是您的“搬运之王”?
- 合力宇锋 | 携手石化行业巨头,打造叉车AGV智能仓配新应用
- 「冀」遇全球,宝骊受邀参加国家级展会
- 政校企齐聚佛朗斯,共探产教融合人才共育新路径
- 华睿科技 | 生态大会|深耕江城智造沃土,AMR聚力产业新局
- 唯创安全 | 叉车安全 9 条 "生命线":违章哪是罚钱,是玩命
- 赋能绿色“锦”程,林德新能源电动平衡重叉车批量交付永荣股份
- 杭叉集团|杭叉集团与杭州电子科技大学信息工程学院共建“海外工程师订单班”,精准赋能全球化人才战略
- 诺力榜样丨扎根诺力二十二载,初心如磐的一线管理先锋 —— 车间主任蒋凎权