解析寻迹智行3D SLAM无人叉车的"智慧"从何而来?(本文纯干货)
转载 2025-07-20 08:37 寻迹智行
在智能制造浪潮下,传统物流正经历前所未有的变革。作为国内智能物流装备领域的先行者,苏州寻迹智行机器人技术有限公司率先研发成功3D SLAM激光导航技术在无人叉车领域应用并实现规模化量产,成功突破高精度环境感知与自主决策的技术瓶颈,重新定义仓储物流的智能化标准。
01 3D激光雷达: 无人叉车的"高精度大脑"
3D激光雷达通过发射激光束(波长905nm/1550nm)并接收反射信号,基于ToF(飞行时间)原理实时构建三维点云地图(精度±2cm@50m)。相比传统2D激光雷达(单层扫描),其优势在于:
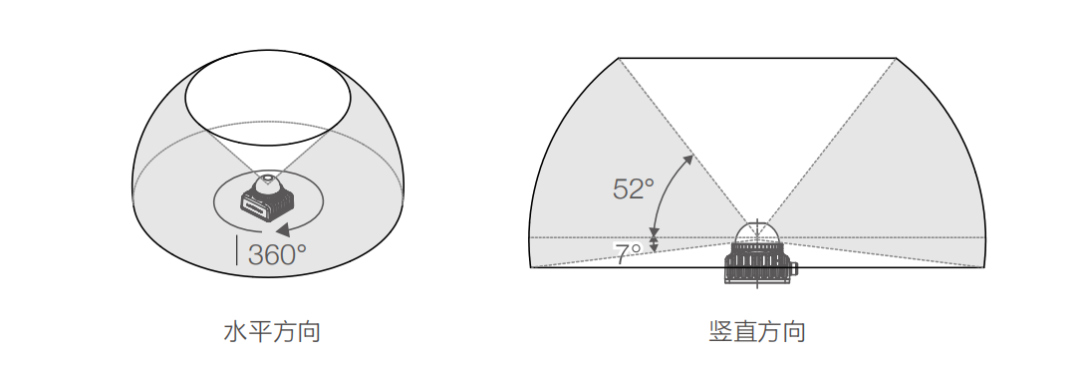
多线束扫描(16线/32线/64线配置),垂直视场角达30°,可识别5cm低矮障碍物;
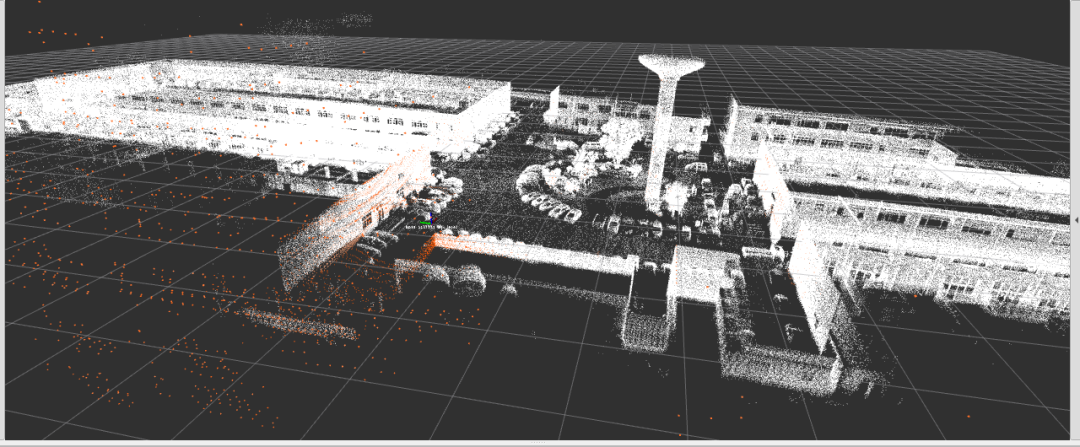
高帧率数据处理(10-20Hz),结合SLAM算法,实现动态环境下的实时定位与建图;
抗干扰能力强,适应粉尘、弱光等工业场景。
02 3D激光雷达VS其他导航: 技术代差显著

01 感知层面升维
与2D方案相比,3D SLAM方案搭载了3D激光雷达和更高算力的控制器,方便机器人采集足够的环境特征完成3D建图与定位,省去了对空间环境的改造,大大提升部署效率;
02 场景适应性增强
在室内高层货架和室外等复杂环境中的适应性显著增强,对动态物体的抗干扰能力也得到了大幅提升;
03 不受环境光约束
无论是昏暗的室内走廊,还是光照强烈的室外场景,均能通过3D slam进行导航、避障,充分释放机器人潜力;
04 盲区小
最小探测距离低至10 厘米,轻松实现无盲区覆盖。
03 1+1>2: 多传感器融合的"技术闭环"
寻迹智行采用异构传感器融合架构:
3D激光SLAM:提供全局定位与动态避障(采用改进A*算法优化路径规划);
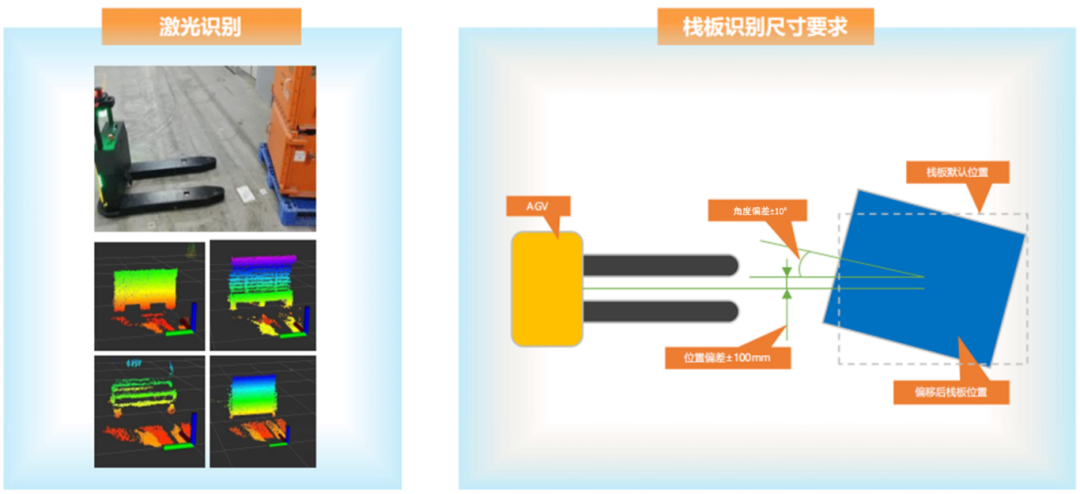
末端视觉定位(点云双目相机):通过模板匹配与亚像素边缘检测,实现托盘叉孔定位精度±5mm;
IMU+轮速计:在激光雷达短暂失效时提供航位推算确保系统鲁棒性。
实测数据:在3C行业电子仓场景中,该方案使托盘对接成功率从95.3%提升至99.6%,单次操作耗时缩短至8秒(传统方式需15秒)。

在智能物流的赛道上,核心技术决定竞争力,苏州寻迹智行以3D激光雷达为基石,通过多传感器融合与工程化创新,持续为客户提供 “高精度、高柔性、高可靠” 的无人搬运解决方案。
相关资讯
更多- 举杯有佳酿,锂电守醇香--比亚迪叉车承包啤酒快乐搬运!
- 山猫叉车“冠军阵型”亮相!谁是您的“搬运之王”?
- 合力宇锋 | 携手石化行业巨头,打造叉车AGV智能仓配新应用
- 「冀」遇全球,宝骊受邀参加国家级展会
- 政校企齐聚佛朗斯,共探产教融合人才共育新路径
- 华睿科技 | 生态大会|深耕江城智造沃土,AMR聚力产业新局
- 唯创安全 | 叉车安全 9 条 "生命线":违章哪是罚钱,是玩命
- 赋能绿色“锦”程,林德新能源电动平衡重叉车批量交付永荣股份
- 杭叉集团|杭叉集团与杭州电子科技大学信息工程学院共建“海外工程师订单班”,精准赋能全球化人才战略
- 诺力榜样丨扎根诺力二十二载,初心如磐的一线管理先锋 —— 车间主任蒋凎权